Milling with robots? Start here—learn 2D and 3D toolpaths
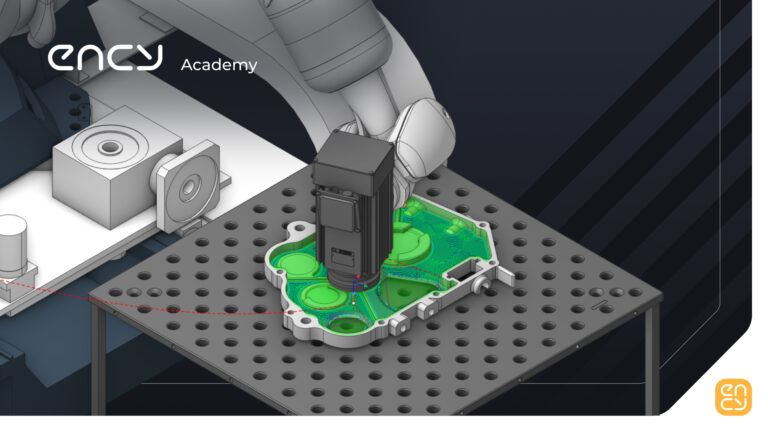
This course of lessons covers the use of a KUKA KR90 robot with a milling spindle end effector to machine an enlarged model of an engine crankcase half, showcasing the 2D and 3D machining possibilities that are available with robotic cells. While we'll cover more complex operations with robots in the future, this serves as a good introduction to managing workflows and operations with a robot.
As you’ll discover, ENCY’s workflow makes potentially complex parts easy and intuitive to work with.
Join the course and see for yourself how simple it is!
📁 Don’t forget to download the required files before starting the training.


Used in the course — download before starting:
Gerry Grainger
Training content producer
Add this certificate to your resume to demonstrate your skills and increase your chances of getting noticed.
Lessons
Loading discussion…
Add this certificate to your resume to demonstrate your skills and increase your chances of getting noticed.
Lessons